
검출기 융합에 기반을 둔 확률가정밀도 (PHD) 필터를 적용한 다중 객체 추적 방법
– Author: 윤주홍, 황영배, 최병호, 윤국진
– Published Date: 7월, 2016년도
– Category: Tracking
– Place of publication: 2016년도 ICROS (제어로봇시스템학회)
Abstract
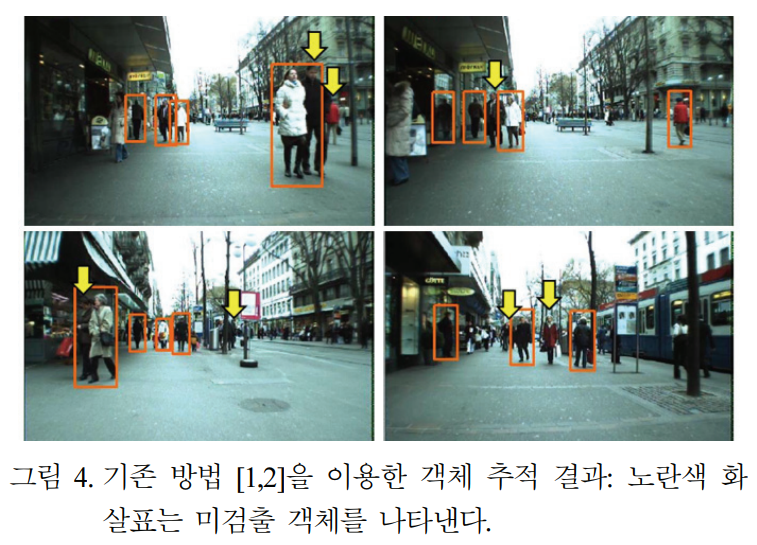
In this paper, a novel multi-object tracking method to track an unknown number of objects is proposed. To handle multiple object states and uncertain observations efficiently, a probability hypothesis density (PHD) filter is adopted and modified. The PHD filter is capable of reducing false positives, managing object appearances and disappearances, and estimating the multiple object trajectories in a unified framework. Although the PHD filter is robust in cluttered environments, it is vulnerable to false negatives. For this reason, we propose to exploit local observations in an RFS of the observation model. Each local observation is generated by using an online trained object detector. The main purpose of the local observation is to deal with false negatives in the PHD filtering procedure. The experimental results demonstrated that the proposed method robustly tracked multiple objects under practical situations.



