
SpherePHD: Applying CNNs on a Spherical PolyHeDron Representation of 360◦ Images
– Conference Date : June 2019
– Category : Convolutional neural network
– Place of conference : Computer Vision and Pattern Recognition(CVPR)
(*: equal contribution)
Abstract:
Omni-directional cameras have many advantages over conventional cameras in that they have a much wider field-of-view (FOV). Several approaches have recently been proposed to apply convolutional neural networks (CNNs) to omni-directional images to solve classification and detection problems. However, most of them use image representations in the Euclidean space defined by transforming the omni-directional views that were originally in the non-Euclidean space. This transformation leads to shape distortion due to nonuniform spatial resolving power and loss of continuity. These effects make existing convolution kernels have difficulties in extracting meaningful information.
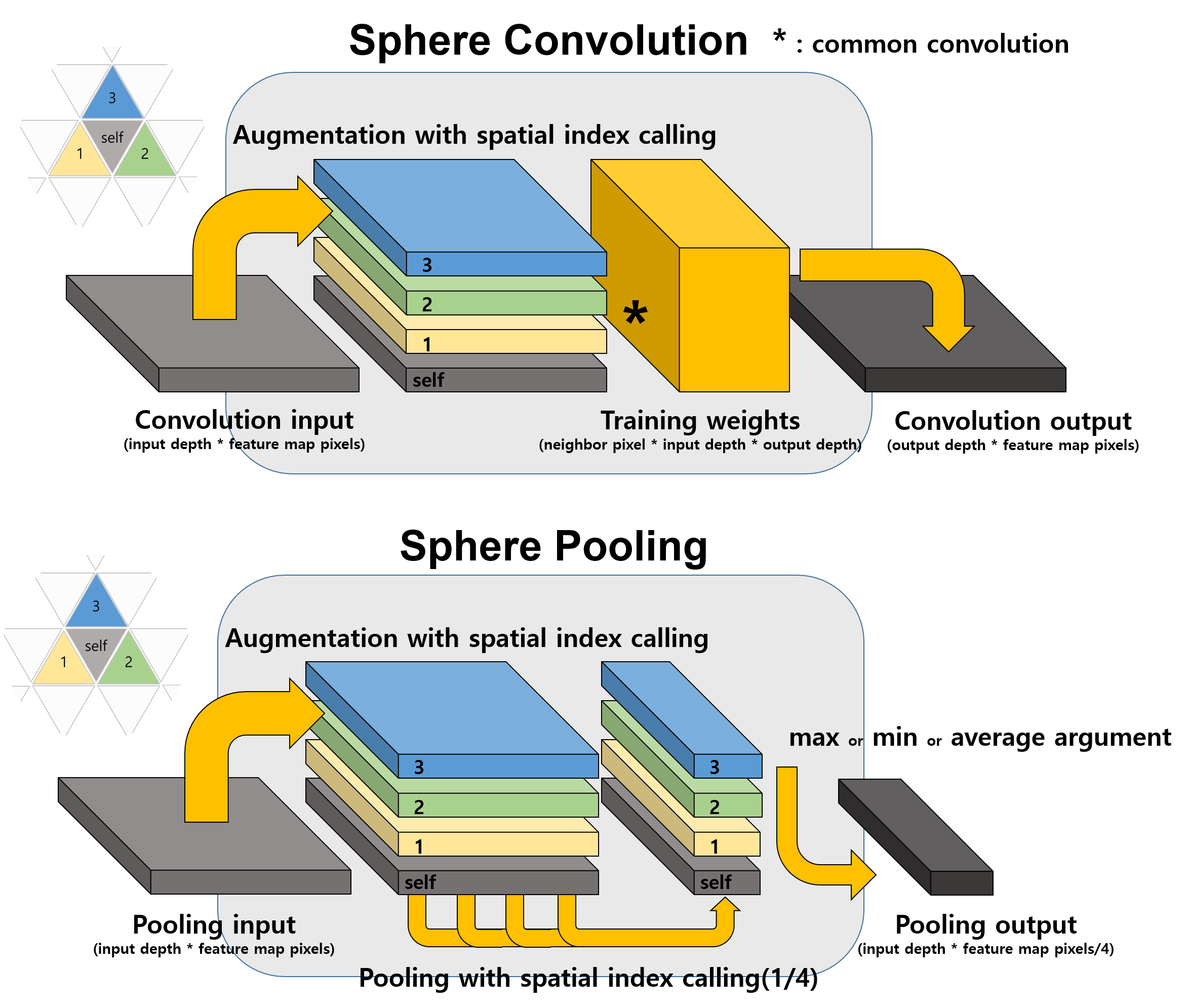
This paper presents a novel method to resolve such problems of applying CNNs to omni-directional images. The proposed method utilizes a spherical polyhedron to represent omni-directional views. This method minimizes the variance of the spatial resolving power on the sphere surface, and includes new convolution and pooling methods for the proposed representation. The proposed approach can also be adopted by existing CNN-based methods. The feasibility and efficacy of the proposed method is demonstrated through both classification and detection tasks.


