
As-Planar-As-Possible Depth Map Estimation
– Published Date : 19.02.01
– Category : Depth estimation
– Place of publication : Computer Vision and Image Understanding(CVIU)
Abstract:
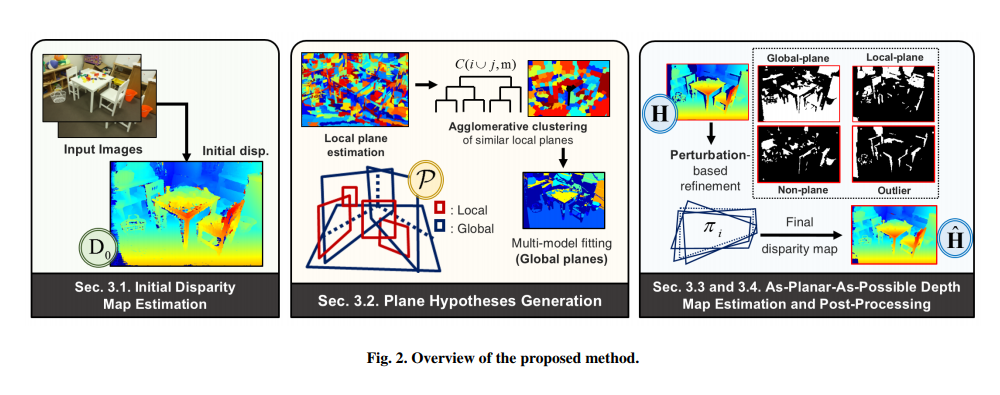
We propose an approach to compute dense disparity maps that takes the characteristics of man-made environments into account. The key contribution is to generate a piecewise planar disparity map while
preventing the oversimplification problem in non-planar regions. To achieve this, we decompose the stereo matching problem into three sequential subproblems: initial disparity map estimation, plane hypotheses generation, and global optimization with plane hypotheses. After finding an initial disparity map, we find local and global plane hypotheses from the disparity map through segmentation-based
local plane fitting, agglomerative hierarchical clustering, and energy-based multi-model fitting techniques. We then estimate a disparity map that is a mixture of over-parameterized and scalar disparity
values while identifying unreliable pixels in an energy minimization framework; disparity values in planar regions are parameterized as a plane, disparity values in non-planar regions are represented as
scalar, and unreliable pixels are marked as outliers. As a post-processing step, we perturb assigned plane parameters as well as scalar disparity values. We experimentally verify the proposed method
using publicly available benchmarks and various stereo matching algorithms.



