
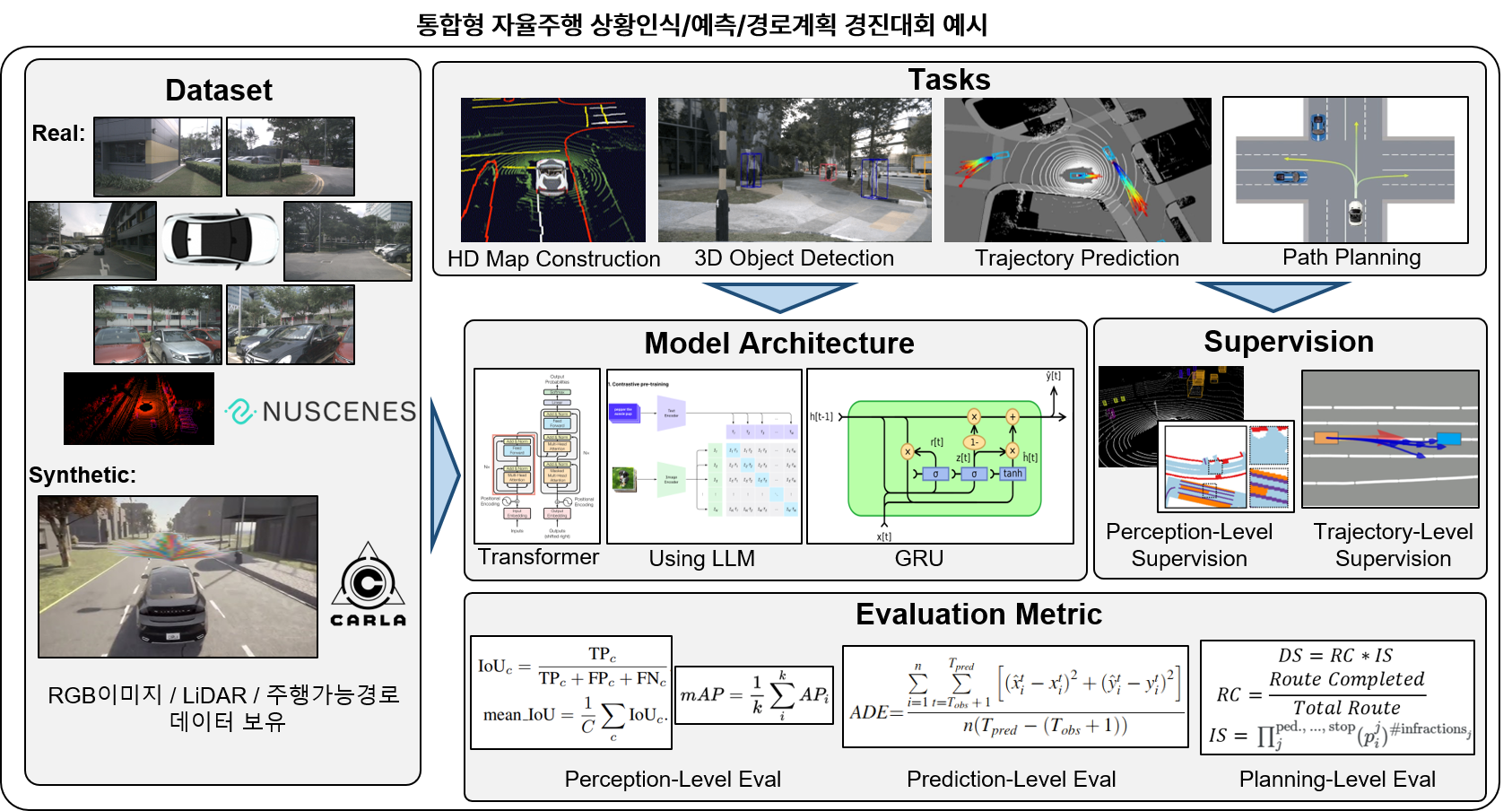
End-to-end autonomous driving is a method where a single model learns to drive by mapping sensor inputs directly to driving actions. This approach eliminates the need for separate perception, planning, and control modules, streamlining the driving process. The model is trained on large driving datasets to handle complex real-world scenarios effectively.
360° Vision
360 vision utilizes visual information from an omnidirectional view, giving it an advantage over traditional small field-of-view cameras. While 360 vision provides a much higher range of visual information, novel methods need to be developed to utilize 360 images for traditional computer vision tasks.
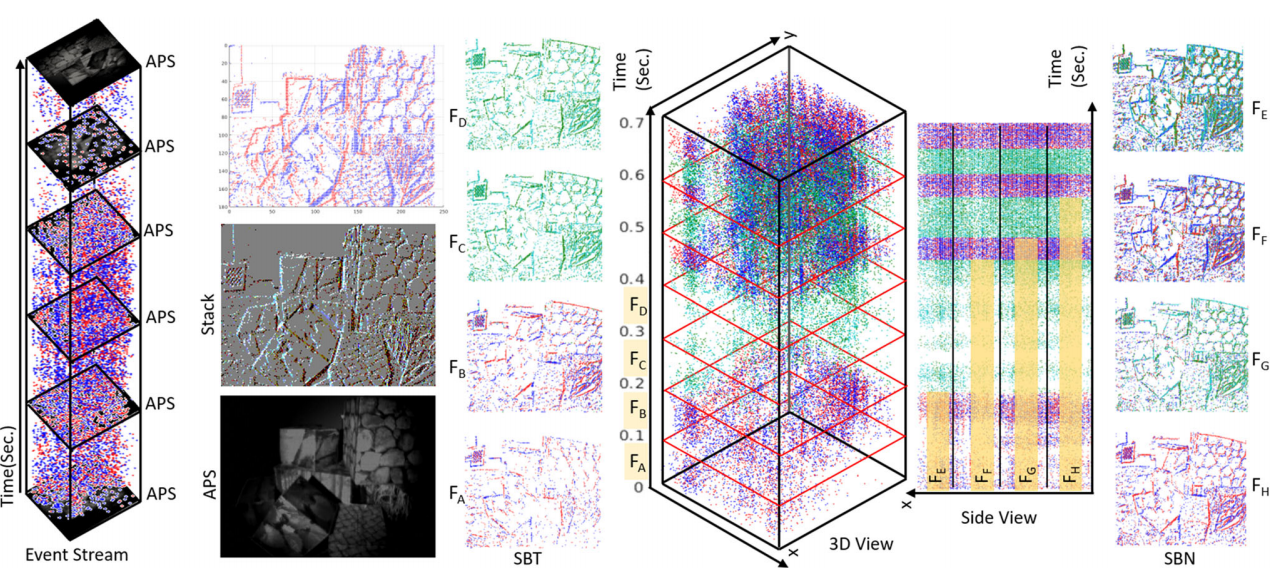
Event Camera
Event cameras have a lot of advantages over traditional cameras, such as low latency, high temporal resolution, and high dynamic range. However, since the outputs of event cameras are the sequences of asynchronous events over time rather than actual intensity images, existing algorithms could not be directly applied. Therefore, it is demanding to generate intensity images from events for other tasks.
Weakly-supervised Semantic Segmentation
Semantic segmentation has achieved significant performance improvement recently. However, unlike other tasks such as object detection and classification, semantic segmentation requires dense pixel-level annotated labels that are time-consuming and costly to acquire. Accordingly, many attempts have been made for weakly-supervised semantic segmentation (WSSS) that only uses image-level classification label. WSSS using image-level classification labels usually utilizes the Class Activation Maps (CAMs) to localize objects of interest in images.
Image Stitching
Image stitching aims to align multiple images captured from different view onto a common coordinate domain to generate an image with wider field of view. However, in large-parallax condition (non-planar scene and large baseline), the stitched images are usually spoiled by ghosting aritfacts or unwanted distortion. We research on pixel-wise warping to relieve the large-parallax condition and to generate the high-quality stitched image.

Robust Stereo Matching
Stereo matching is one of the most popular researches in computer vision because the technique can provide depth information between a camera and objects. To this end, we find correspondences between multiple images. Afterwards, disparity between correspondences can be exploited as depth for object recognition, visual surveillance, and other fields.
Trajectory Prediction
Trajectory Prediction is the problem of predicting the short-term (1-3 seconds) and long-term (3-5 seconds) spatial coordinates of various road-agents such as cars, buses, pedestrians, rickshaws, and animals, etc. These road-agents have different dynamic behaviors that may correspond to aggressive or conservative driving styles.
Object Tracking
Object tracking technique is important for many computer vision applications such as security and surveillance, robotics, automotive driver assistant systems, etc. The role of object tracking is to track multiple or single objects and keep their identity as long as possible.