
Scanline Resolution-invariant Depth Completion using a Single Image and Sparse LiDAR Point Cloud
– Published Date : TBD
– Category : Depth Completion
– Place of publication : IEEE Robotics and Automation Letters (RA-L) 2021
Abstract:
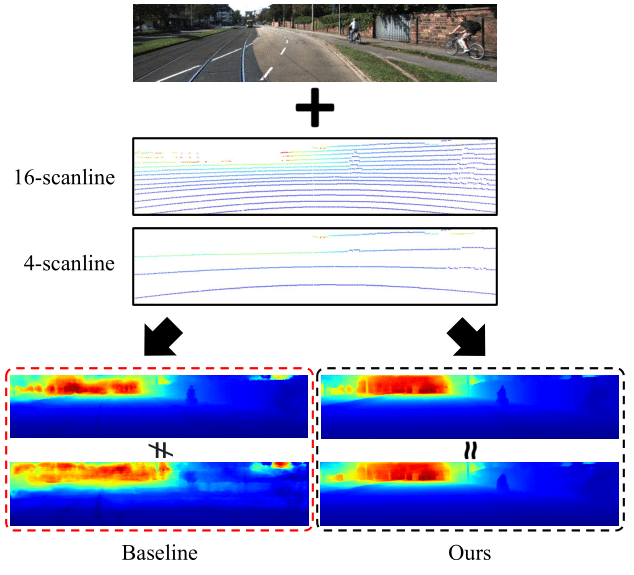
Most existing deep learning-based depth completion methods are only suitable for high (64-scanline) resolution LiDAR measurements, and they usually fail to predict a reliable dense depth map with low resolution (4, 8, or 16- scanline) LiDAR. However, it is of great interest to reduce the number of LiDAR channels in many aspects (cost, weight of a device, power consumption). In this paper, we propose a new depth completion framework with various LiDAR scanline resolutions, which performs as well as methods built for 64- scanline resolution LiDAR inputs. For this, we define a consistency loss between the predictions from LiDAR measurements of different scanline resolutions. (i.e. 4, 8, 16, 32-scanline LiDAR measurements) Also, we design a fusion module to integrate features from different modalities. Experiments show our proposed method outperforms the current state-of-theart depth completion methods for input LiDAR measurements of low scanline resolution and performs comparably to the methods(models) for input LiDAR measurements of 64-scanline resolution on the KITTI benchmark dataset.
