
Non-Coaxial Event-guided Motion Deblurring with Spatial Alignment
– Published Date : TBD
– Category : Motion Deblurring
– Place of publication : IEEE/CVF International Conference on Computer Vision (ICCV) 2023
Abstract:
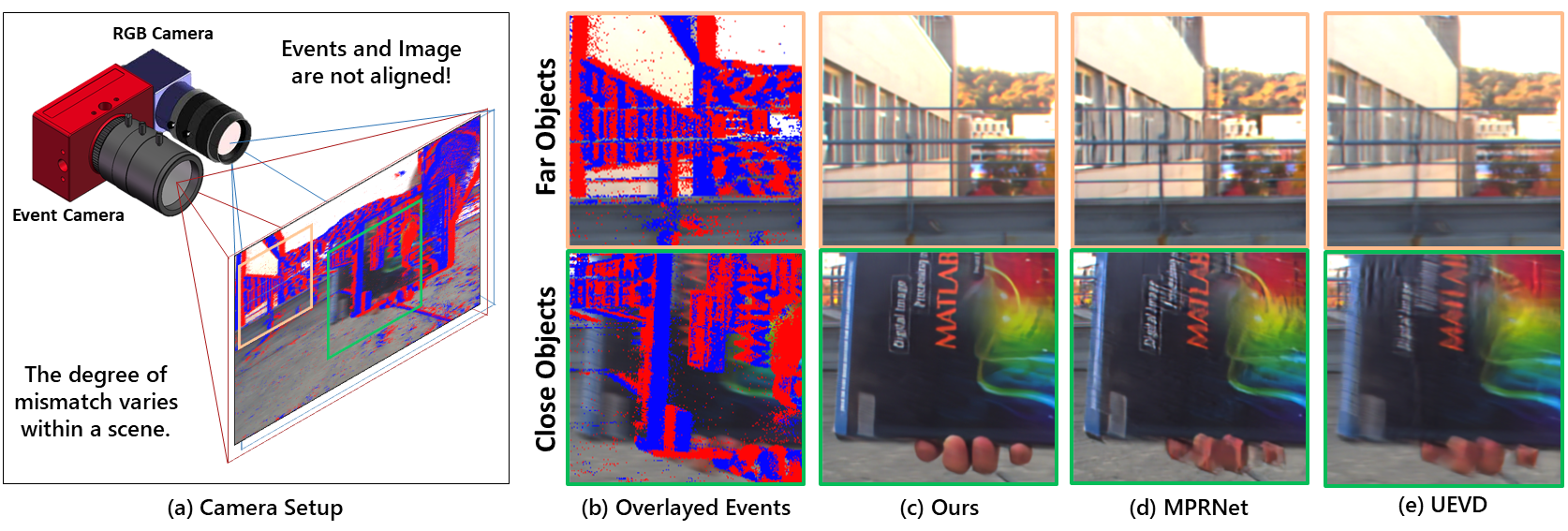
Motion deblurring from a blurred image is a challenging computer vision problem because frame-based cameras lose information during the blurring process. Several attempts have compensated for the loss of motion information by using event cameras, which are bio-inspired sensors with a high temporal resolution. Even though most studies have assumed that image and event data are pixel-wise aligned, this is only possible with low-quality active-pixel sensor (APS) images and synthetic datasets. In real scenarios, obtaining per-pixel aligned event-RGB data is technically challenging since event and frame cameras have different optical axes. For the application of the event camera, we propose the first Non-coaxial Event-guided Image Deblurring (NEID) approach that utilizes the camera setup composed of a standard frame-based camera with a non-coaxial single event camera. To consider the per-pixel alignment between the image and event without additional devices, we propose the first NEID network that spatially aligns events to images while refining the image features from temporally dense event features. For training and evaluation of our network, we also present the first large-scale dataset, consisting of RGB frames with non-aligned events aimed at a breakthrough in motion deblurring with an event camera. Extensive experiments on various datasets demonstrate that the proposed method achieves significantly better results than the prior works in terms of performance and speed, and it can be applied for practical uses of event cameras.



