
Doppler-Aware LiDAR-Radar Fusion for Robust 3D Detection in Adverse Weather
– Published Date : 2025.10.19
– Category : LiDAR-Radar Fusion
– Place of publication : IEEE/CVF International Conference on Computer Vision (ICCV) 2025
Abstract:
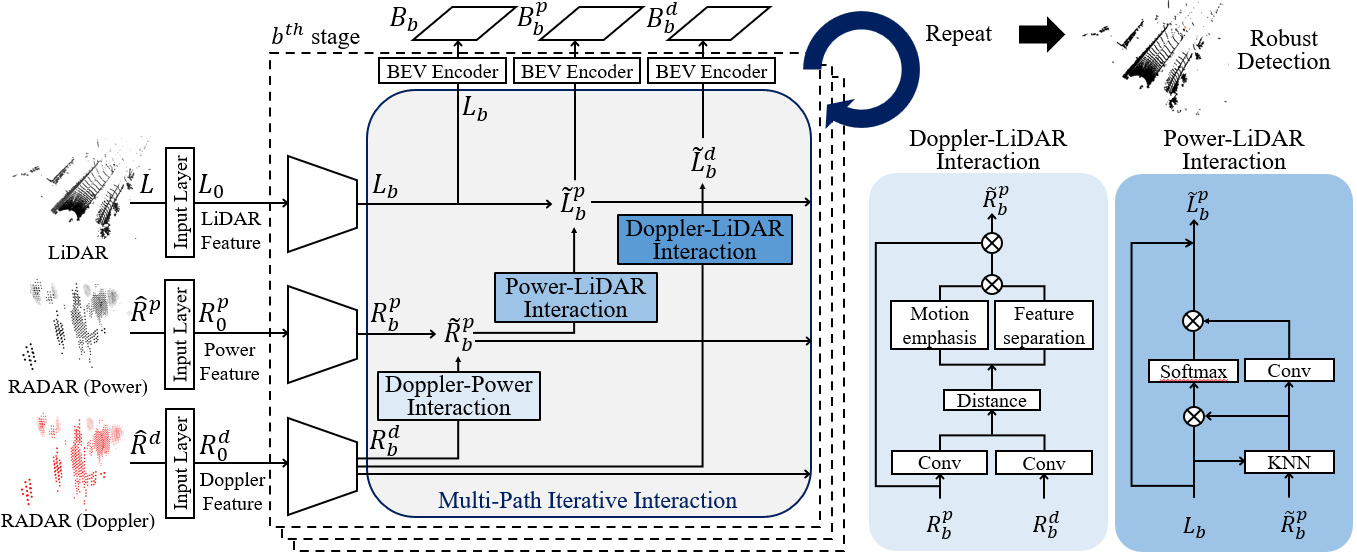
Robust 3D object detection across diverse weather conditions is crucial for safe autonomous driving, and RADAR is increasingly leveraged for its resilience in adverse weather. Recent advancements have explored 4D RADAR and LiDAR-RADAR fusion to enhance 3D perception capabilities, specifically targeting weather robustness. However, existing methods often handle Doppler in ways that are not well-suited for multi-modal settings or lack tailored encoding strategies, hindering effective feature fusion and performance. To address these shortcomings, we propose a novel Doppler-aware LiDAR-4D RADAR fusion (DLRFusion) framework for robust 3D object detection. We introduce a multi-path iterative interaction module that integrates LiDAR, RADAR power, and Doppler, enabling a structured feature fusion process. Doppler highlights dynamic regions, refining RADAR power and enhancing LiDAR features across multiple stages, improving detection confidence. Extensive experiments on the K-RADAR dataset demonstrate that our approach effectively exploits Doppler information, achieving state-of-the-art performance in both normal and adverse weather conditions. The code will be made publicly available.


